

C1 Cockpit
C1 Cockpitとは
ARグラス、VRゴーグルで車載カメラ映像を見ながら(*)、ドライビングシミュレータのステアリングコントローラで、1/10 RC Carを運転できます。小さくなってラジコンマシンに乗り込んで運転する感覚が得られます。
特長は、操作性の高さです。2023年4月16日に開催された、C1/X 2023 Rd.1 OSAKAで、C1 Cockpit操作の#6_C1 Racingが予選トップタイムを記録し(決勝はプロポ操作の#1_YOKOMOに抜かれ2位→Results)、プロポ操作に匹敵する操作性を証明できました。1/10 RC Carで100km/hで走行することは、実車換算で1000km/hで走行することですが、そのような地上最速レベルのドライビングを実現できるよう、今後も操作性を追究していきます。
C1 Cockpitの開発初期段階もそうでしたが、操作性が低いと運転していて楽しくありません。一方で、C1 Cockpitを使用し、F1(レース平均速度 約230km/h)を凌駕するスピードで走ることは「爽快」です。
・Car(EP)・・・有
・Quadcopter(EP/HEP)・・・有
・Boat(GP)・・・2025年頃
・Monocopter(GP)・・・2026年頃
・Aircraft(EP/GP)/Fighter(GP)・・・2026年頃
・Car(GP)
・Tank(EP)・・・2027年頃
・4足歩行Robot
* C1 Cockpitで車載映像を送信するには、アマチュア無線4級以上の資格と無線局の開局が必要になります。
C1 Cockpit for Carの機器構成
● C1 Cockpit for Car
:C1 Cockpitのハード総称。以下4つのモジュールで構成される。
・ヘッドトラッキングモジュール:ドライバーの頭の向きの変化を検知し、その情報をPCへ送る。
・信号送信モジュール:PCから、ステアリングコントローラの操作信号とドライバーの頭の向きの変化情報を受け、信号受信モジュールへ送る。
・信号受信モジュール:信号送信モジュールから、ハンコンの操作信号とドライバーの頭の向きの変化情報を受け、ESC(モーターを動かす)、ステアリングサーボ、映像送信モジュールのカメラサーボへ動作指令を出す。
・映像送信モジュール:車載カメラの映像を、映像受信機へ送り、ARグラス等で見られるようにする。また、信号受信モジュールからの指令に則って、車載カメラの向きを変える。
● アプリ
:C1 Cockpitの動作アプリ。遠隔操作のコントロールと設定をする。
C1 Cockpit for Car の操縦支援機能
1) ステアリング(ハンドル)へのフォースフィードバック
ステアリングの舵角に応じた復元力が働きます。
2) 車載カメラ方向転換機能
ドライバーの頭部に、C1 Cockpitに含まれるジャイロセンサモジュールを設置することにより、ドライバーが向いた方向を、車載カメラが向きます。
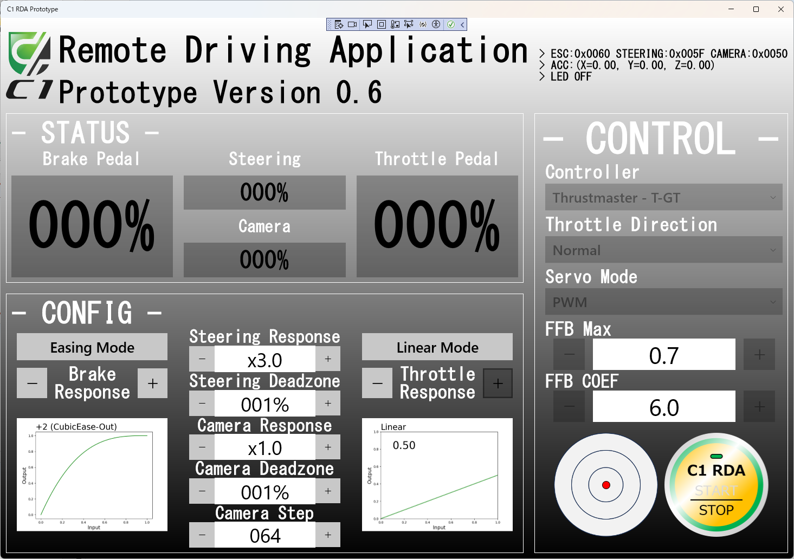
3) 機器設定調整機能
ステアリング感度、スロットル(アクセル)感度、ブレーキ感度、フォースフィードバックの復元力、ジャイロセンサ感度等を、PCアプリで調整することができます。
C1 Cockpit for Carの販売参考価格
¥500,000(税込)~
リースのみ。
イベントでの活用を希望される方
Contactページよりご連絡ください。
試乗について
弊社開催や他社と併催のイベントにて、試乗いただける場をつくっていきます。
開催の通知は本ウェブサイトのHome NEWS部にてお知らせします。
 C1 Cockpit for Car アプリ画面
C1 Cockpit for Car アプリ画面
 C1/X 2023 Rd.1 OSAKA
C1/X 2023 Rd.1 OSAKA
 C1 Cockpit(汎用)
C1 Cockpit(汎用)
